
Maker Faire Tokyo 2019で、紙でロボットフィッシュを作るハンズオンをやろうと思って色々作り込んで頑張ったのですが、今年は作り物が多過ぎてインストラクションが間に合いませんでした。というお話。
雑誌「子供の科学」の7、8、9月号に連載されたロボシャークの簡単版というか、最初のきっかけになったハードウェアスケッチ(動くアイデア検証モデル)をベースに、ロボットの動きを通して魚の動きについて考える生物モデル教材としてや、さまざまな動きを見ながらコードに触れてプログラムの結果を見て&感じながら学ぶ教材として機能する、作る楽しさと動かす楽しさを学ぶロボットフィッシュを作ってみました。
まずはハードウェアスケッチ!
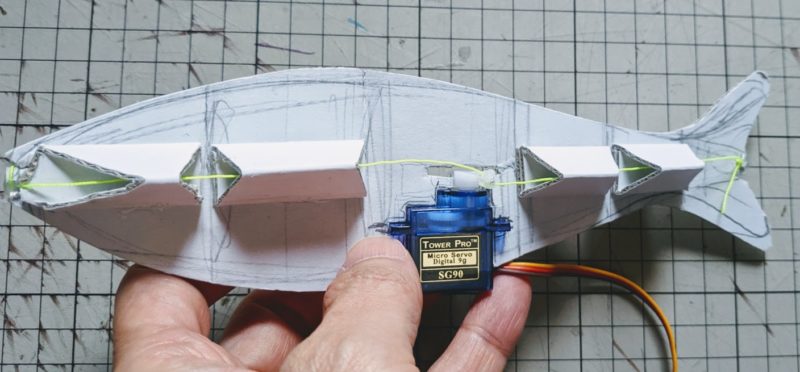
前述の通り、最初のハードウェアスケッチは雑誌「子供の科学」の打ち合わせに行く前日に、工房にあったダンボールの切れ端で作ったものです。
比較的どこでも手に入りやすい安価なサーボモータ1台で、魚の動きを再現することを目指したものです。
A4用紙に入る大きさに
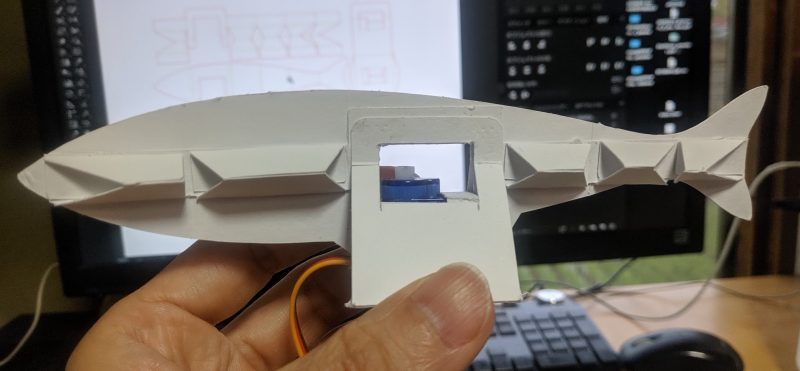
最初のモデルはダンボール製でしたが、ハサミで切るのが難しいかも?と考え、PDFをダウンロードして自宅のプリンターでプリント&カットし作れる様にします。
そのためには必要なパーツをA4サイズより少し小さい用紙に全て入る様に設計します。また実際に動かしてみてサーボの位置や骨の間隔を詰めていきます。

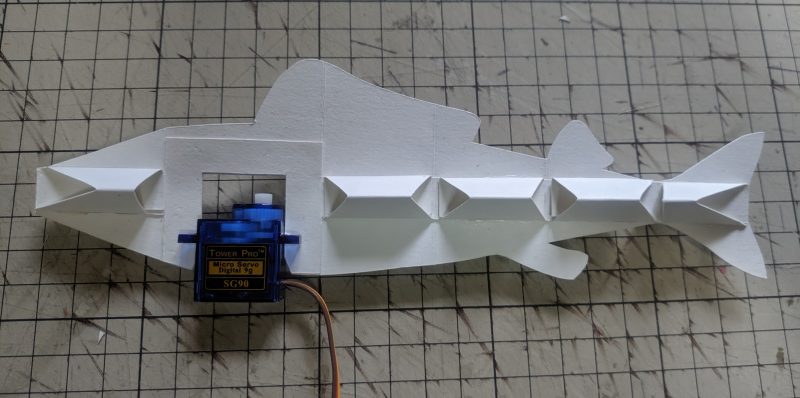
よりリアルな魚を目指して
加えて、魚の構造を示す部分だけでなく、表面を加えることでよりリアルな魚を表現し、着彩したり形を追求したりできる作る楽しさを拡張する部分も用意します。
この辺りは紙ならではのところで、日頃学習に使っているペンやハサミで、気軽に思い通りにトコトン作り込む楽しさが得られるところと考えました。

こうして作成したペーパーロボットフィッシュの組立キット、ちょっと時間がある時に机の上に出してサンプルを作ってい時に、何人かにお声がけいただき大変興味を持っていただけたのに、完成品としてお届けできずに大変申し訳なく思っています。
実はこのロボットフィッシュは、ArduinoのIDEのサーボモータのサンプルファイルだけで、かなり魚っぽい動きをします。(動画を録る時間があれば良かったのですが…)
もちろんRaspberry PiのGPIOに接続してScratchなどでも動かせますので、画面の中でプログラムを学ぶのに加えて、プログラムを組んだ結果を動きや形で確認できる=機能させることに繋がる教材になると考えて作っています。
いま少しお時間いただき、パッケージとして完成させて提供できれば良いな〜と思います。まだまだEnjoy Makingです!